Search
robotics automation and control
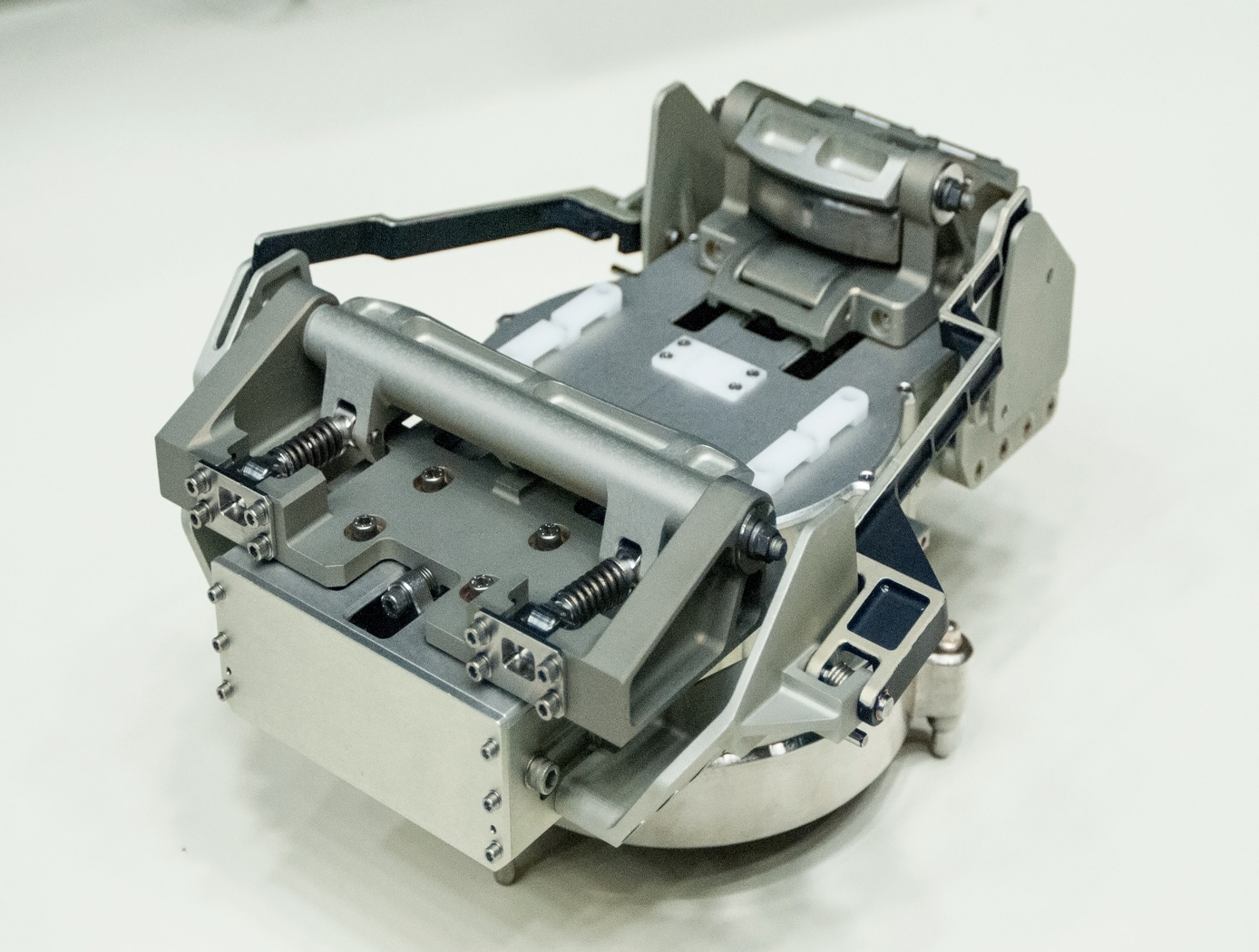
Robotic gripper for satellite capture and servicing
The Gripper is located at the end of a robotic system consisting of a robotic arm equipped with a Tool Drive or End Effector comprising the input actuator to the Gripper as well as the structural, power and data link between the Gripper and the robotic arm. In a notional concept of operations, a Servicer would approach the Client in an autonomous rendezvous and capture (AR&C) maneuver. When the Servicers sensor suite confirms that the distance, orientation, and relative translational and angular rates with respect to the Client are within an acceptable range, the Servicer enables the grasping sequence, where the robotic arm, equipped with Gripper, extend forward to the Client. When the Gripper/ Servicer sensors indicate that the Client marman ring is sufficiently within the capture range of the Gripper, a trigger signal is sent to the robot control system that commands the End Effector to drive the mechanism of the Gripper and affect closure around the marman ring. The Gripper consists of a pair of jaws which are driven by an internal transmission. The transmission receives input torque from the End Effector and converts the torque to appropriate motion of the jaws.
manufacturing
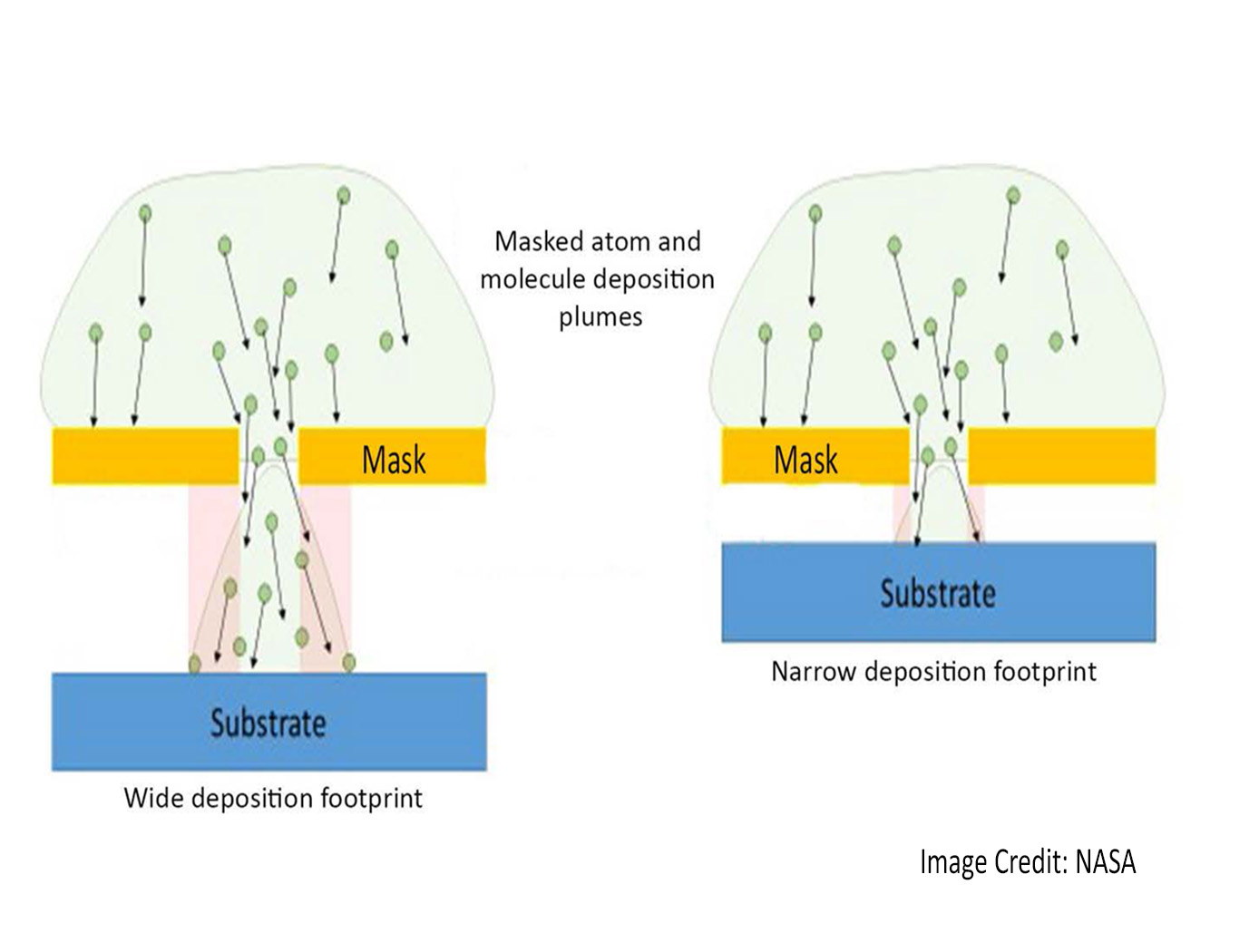
Simplified Complimentary Metal-oxide-semiconductor Manufacturing Technique
This innovation represents an alternative method to skip several of the conventional fabrication steps, using a mask designed to allow molecules in a sputtering plume to pass through openings engineered in the mask. This causes material to go where desired, without photoresist, and without selective etching, thus simplifying the process, reducing cost, chemical waste; and increasing throughput.
This method masks areas that do not need deposited material, causing local deposition instead. The shape and size are within tolerance. No etching steps, no photoresist patterning, and no metal removal is necessary. Other than planarization, selective deposition has replaced every step in the conventional process, accomplishing the same result in 8 steps instead of 19.
The technology can be easily used to fabricate custom chips and specialized sensors and devices that use the group III-V and II - VI semiconductor materials.
environment

Wastewater Treatment and Remediation
NASA's system was developed for smaller-scale, space-based applications. However, the technology is scalable for larger industrial and municipal water treatment applications. Implementation of the Ammonia Recovery System could significantly reduce nitrogen content from water treatment processes, meaningfully improving the quality of water. This system offers a novel way to reduce nitrogen water pollutants, while allowing for the nitrogen to be collected and reused- reducing environmental and public health risks and providing an environmentally friendly fertilizer option. NASAs environmental solutions work to sustain life on earth through space based technology
The adaptable nature of this system gives it potentially broad applications in a wide variety of industries; it is particularly ideal for on-site remediation of wastewater in places like condo complexes, hotels and water parks. Current methods of ammonia recovery could not meet NASAs mission requirements, so a new process was devised to optimize for high ammonia selectivity, simplicity, low volume , low power usage and zero contaminants in the effluent. To do this, NASA designed a novel regenerable struvite-formation system for the capture of ammonia. This system has three primary functions:
1) Removal of ammonia from wastewater using a media that is highly selective for ammonia
2) Capture of the ammonia for later use (e.g., as a fertilizer)
3) Regeneration of the capture media for reuse in the system
electrical and electronics
Robust High Temperature SiC Op Amps Practical Fabrication
The technology is part of a new generation of NASA Glenn SiC integrated circuits with unprecedented durability in the field of high-temperature electronics. For robust operational amplifiers based on SiC Junction Field Effect Transistors (JFETs), this novel compensation method mitigates issues with threshold voltage variations that are an effect of die location on the wafer. Modern high-temperature op amps on the market fall short due to temperature limits (only 225C for silicon-based devices). Previously, researchers noted that multiple op amps on a single SiC wafer had different amplification properties due to different threshold voltages that varied spatially as much as 18% depending on the circuit's distance from the SiC wafer center. While 18% is okay for some applications, other important system applications demand better precision. By applying this technology to the amplifier circuit design process, the op amp will provide the same signal gain no matter its position on the wafer. The compensation approach enables practical signal conditioning that works from 25C up to 500C.
health medicine and biotechnology
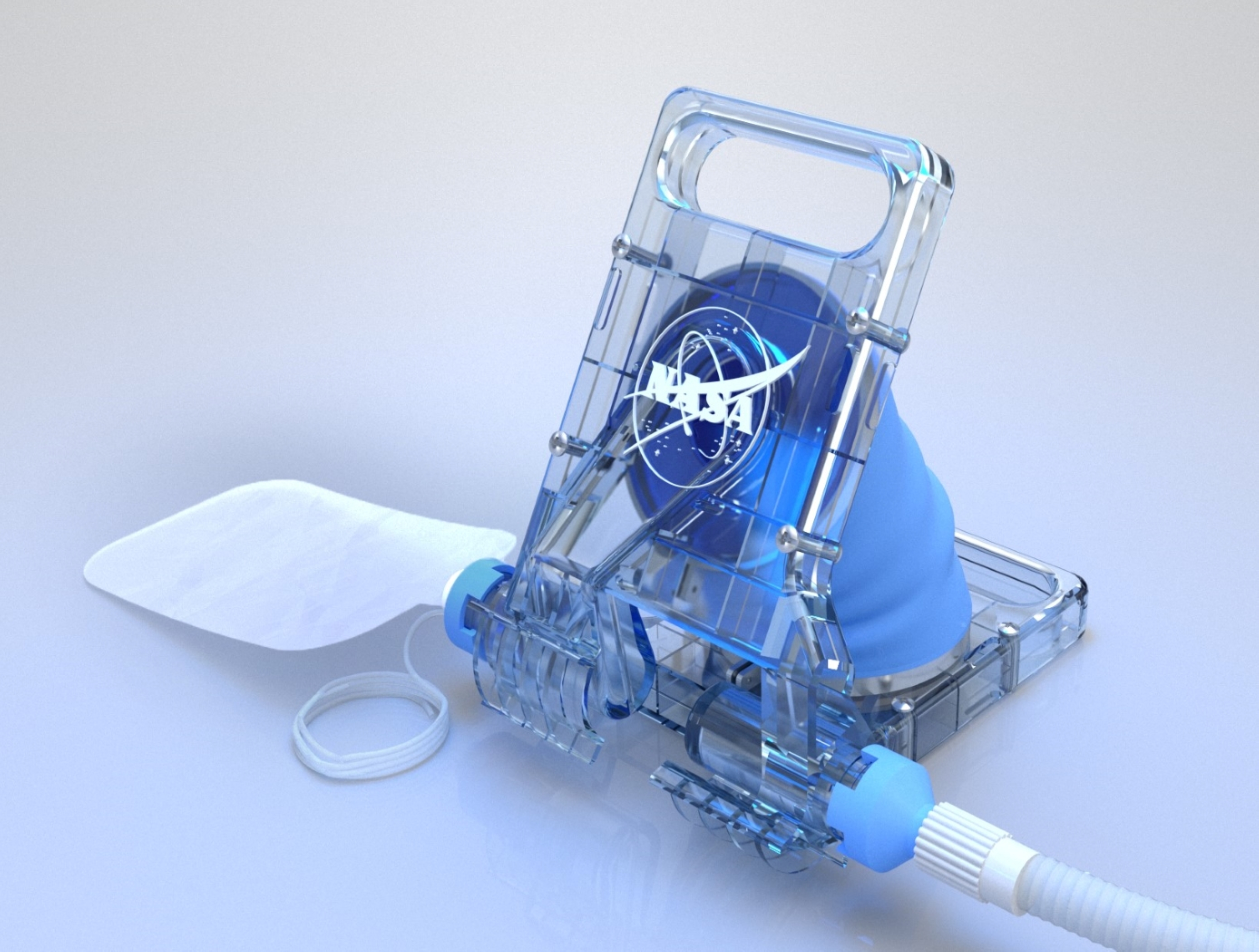
Human-Powered Ventilator
In space there are a limited number of care providers, and those providers are not always clinicians with extensive medical training. Space travel also has limited room to provide care and limited consumables. The Human-Powered Ventilator is compact, portable, and easy to assemble. It is designed so that users can implement hand and arm movements to pump the bellows between two hinged, clamshell-like panels back and forth to provide positive pressure ventilation to the patient. A light spring is incorporated into the design to assist in expanding the bellows, drawing air out of the patients lungs, and reducing the physical load on the operator without compromising the tactile feel necessary for proper usage. The airflow can be supplemented with prescribed medical vapors, oxygen, etc. via standard industry fittings.
The Human-Powered Ventilator is TRL 6 (system/subsystem prototype has been demonstrated in a relevant environment) and it is now available for your company to license. Please note that NASA does not manufacture products itself for commercial sale.
mechanical and fluid systems
Liquid Sorbent Carbon Dioxide Removal System
NASA's Liquid Sorbent Carbon Dioxide Removal System was designed as an alternative to the current CO2 removal technology used on the International Space Station (ISS), which uses solid zeolite media that is prone to dusting, has a low absorption capacity, and requires high regeneration temperatures and frequent maintenance. Motivated by CO2 removal systems on submarines, NASA innovators began investigating the use of liquid sorbents. Liquid sorbents have a capacity four times greater than solid zeolites, require low regeneration temperature, and need fewer unreliable moving mechanical parts than solid based systems. While submarine CO2 scrubbers spray an adsorbing chemical directly into the air stream and allow the liquid to settle, NASA's new system uses a capillary driven 3D printed microchannel direct air/liquid contactor in a closed loop system. The Liquid Sorbent Carbon Dioxide Removal System is robust and reliable, while being low in weight, volume, and power requirements. The system is capable of reaching equilibrium when the liquid sorbent surface is being regenerated at a rate equal to the rate of absorption into the liquid.
robotics automation and control

Tri-Rotor Steering Wheel Yields Programmable Vehicular Control
Since NASAs Apollo program of the late 1960s and 1970s, many previous LTV hand controllers (e.g., joysticks, T-handles) were developed and utilized albeit with shortcomings. Some of these options yielded the desired level of control but were too physically taxing to use for long periods of time in a spacesuit environment. Others simply did not offer the necessary fine motor control. Thus, there has been a long-standing need for controllers that improve upon both of these limitations.
The Tri-Rotor is a novel hand controller designed to reduce operator fatigue, add control capabilities (beyond those of a joystick), and increase the fidelity of control inputs. The design consists of two slotted handles that rotate independently within opposite sides of the Tri-Rotor main-body. Each handle is programmable and can rotate 45 degrees. In this iteration, the right handle rotates counterclockwise and acts as an accelerator and brake. The left handle rotates both clockwise and counterclockwise and controls crabbing whereby the vehicles rear wheels turn in the same direction as the front wheels facilitating diagonal or possibly lateral movement. The main-body of the Tri-Rotor rotates upon a central pivot like an automotive steering wheel and can provide directional input for Ackermann-like steering.
The handles on the Tri-Rotor are designed with spacesuit kinematics in mind and are operated using the pronated and supinated motions of the astronauts hands allowed by the wrist bearings between the glove and the forearm of the spacesuit. The devices central steering pivot is also operated by the hands and is leveraged by the up and down motions of the arms allowed by the constant volume joints in the spacesuits shoulders. This hand controller design staves off operator fatigue and sheds the need for separate fine-dexterity controls without sacrificing precision.
The Tri-Rotor Hand Controller has a technology readiness level (TRL) 5 (component and/or breadboard validation in relevant environment) and is now available for patent licensing. Please note that NASA does not manufacture products itself for commercial sale.
Robotics Automation and Control
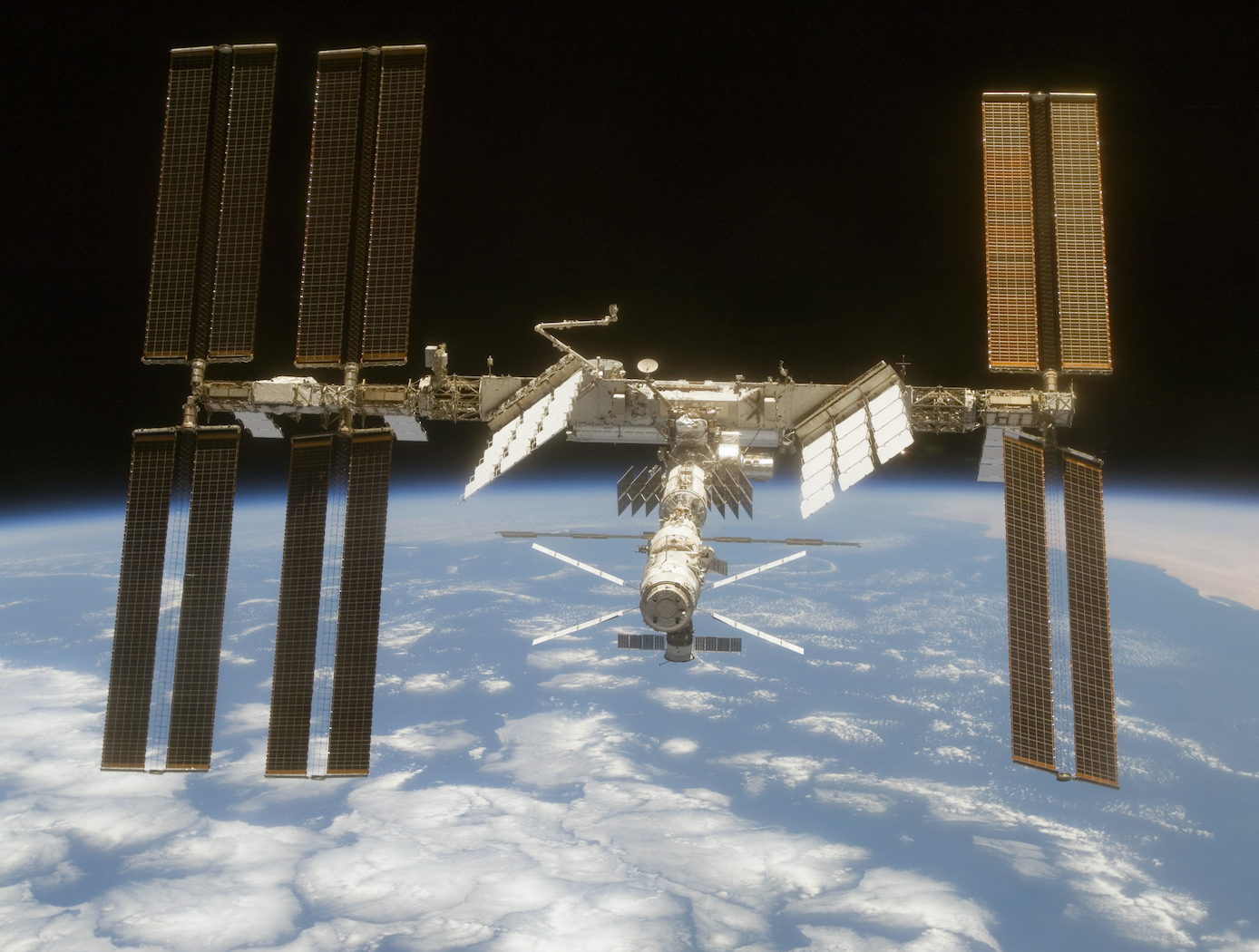
Robotic Assembly of Photovoltaic Arrays
NASA researchers have developed the PAPA technology to increase the efficiency of the thin-film solar array assembly process, significantly decreasing assembly time and labor costs associated with manufacturing large scale solar arrays. Traditional solar cell assembly is a labor intensive, multi-step, time-consuming process. This manual assembly will not be possible in a space environment. To enable solar array assembly in space, PAPA leverages robotic automation to distill the traditional assembly method into four fully automated steps: applying adhesive to block substrate, placing the solar cells using a vacuum tool attached to a universal robotic arm, printing the interconnects and buses to connect the cells, and applying a protective cover.
The PAPA technology is compatible with a variety of thin-film solar cells, including 3D printed cells (essential for future in-space manufacturing of arrays) and terrestrial manufacturing methods. As solar cell technologies mature, PAPA will be able to incorporate advancements into the paneling process. NASA researchers have begun to employ PAPA solar array fabrication and estimate savings of $300-$400/watt. For extraterrestrial assembly of solar panels the size of a football field or larger, PAPA could result in savings of approximately $500 million; a substantial cost savings driven by standardization and efficiency in the solar array assembly process. By demonstrating increases in assembly efficiency, time and cost savings, and passing multiple environmental exposure tests, the PAPA lab protype has completed the final phases of technology development and is ready for scale-up and commercialization.
robotics automation and control

Circumferential Scissor Spring Enhances Precision in Hand Controllers
The traditional scissor spring design for hand controllers has been improved upon with a circumferential spring controller mechanism that facilitates easy customization, enhanced durability, and optimum controller feedback. These advantages are partially facilitated by locating the spring to the outside of the mechanism which allows for easier spring replacement to adjust the deflection force or for maintenance.
The new mechanism is comprised of two rounded blades, or cams, that pivot forward and back under operation and meet to form a circle. An expansion spring is looped around the blade perimeter and resides in a channel, providing the restoring force that returns the control stick to a neutral position. Due to the use of a longer circumferential spring, the proportion of spring expansion is smaller for a given distance of deflection, so the forces associated with the deflection remain on a more linear portion of the force deflection curve.
The Circumferential Scissor Spring for Controllers is at technology readiness level (TRL) 8 (actual system completed and flight qualified through test and demonstration) and is available for patent licensing. Please note that NASA does not manufacture products itself for commercial sale.
propulsion
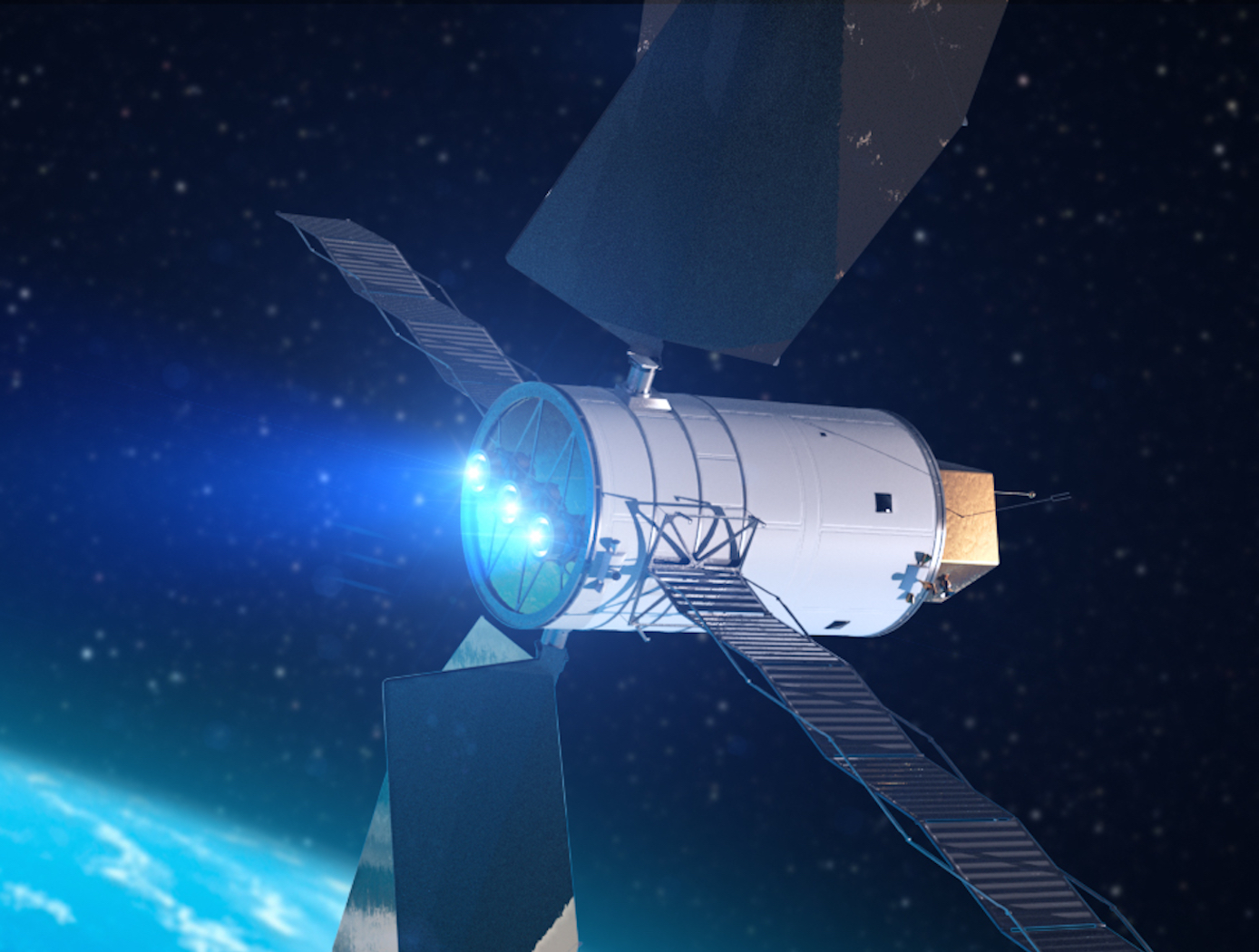
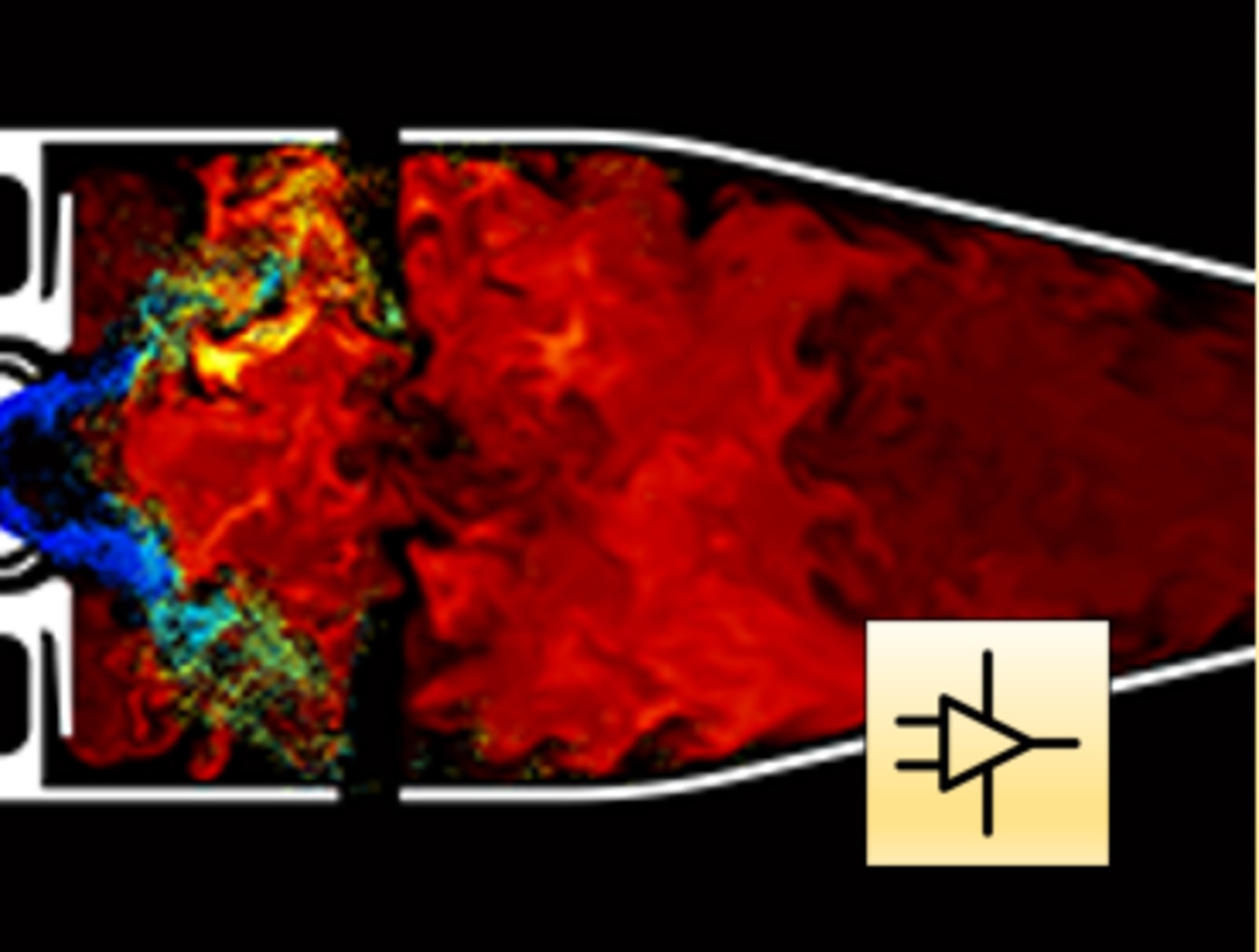
Power Processing Unit (PPU) for Small Spacecraft Electric Propulsion
Key subsystems of a scalable PPU for low-power Hall effect electric propulsion have been developed and demonstrated at NASA GRC. The PPU conditions and supplies power to the thruster and propellant flow control (PFC) components. It operates from an input voltage of 24 to 34 VDC to be compatible with typical small spacecraft with 28 V unregulated power systems. The PPU provides fault protection to protect the PPU, thruster, PFC components, and spacecraft. It is scalable to accommodate various power and operational requirements of low-power Hall effect thrusters. An important subsystem of a PPU is the discharge supply, which processes up to 95% of the power in the PPU and must process high voltage to accelerate thrust generating plasma. Each discharge power module in this PPU design is capable of processing up to 500 W of power and output up to 400 VDC. A full-bridge topology operating at switching frequency 50 kHz is used with a lightweight foil transformer. Two or more modules can operate in parallel to scale up the discharge power as required. Output voltage and current regulation controls allow for any of the common thruster start-up modes (hard, soft or glow).
<br><br><br>

